1)采用数字高清雷达。高清雷达是指发射的雷达能很清晰的分辨出经过雷达范围的车辆。高清晰度取决于雷达的带宽,带宽越宽雷达发射的扫描频率也就越高,也就能更清楚地分辨车辆。
2)每秒发射100万次雷达波,能精度定位车辆,同时可以跨越中央隔离带的防眩板、树丛及金属护栏等障碍物检测到部分被遮挡的车辆,从而大大降低了隔离带对检测精度的影响。
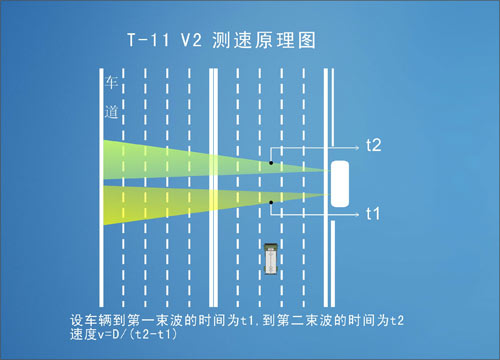
3)T-11 V2 适用于任何侧移量,可以同时检测双向22个车道的交通数据,包括车流量、单车速度、平均速度、车型分类、车道占有率、车头距、车间距等交通数据。检测单车速度原理:在检测路面上投映两个微波带,下图中t1和t2分别为两个微波带边角线,两条边角线是平行的,它们之间的距离是一定的,所以车辆通过t1到t2的时间就能精确计算出所通过车辆的速度V=D/(t1-t2);同时根据t1到t2的时间,精确计算车辆的长度。如下图:
4)T-11 V2 是根据车辆为基础来检测的,无论车辆在检测区域内的任何位置行驶,都只会显示一辆车,即使在两个车道中间行驶,也不会像模拟设备一样检测到两辆车或者检测不到车辆,从而大大提高了单车道的车流量精度。
5)T-11 V2 能够自动识别车辆行驶方向,尤其适用于潮汐车道的信息采集。根据不同行驶方向的车流状态,控制中心可以适时使用远程控制手段对标志牌进行控制,若实现计算机联网的路口信号机,还能自动识别系统进行辨别并自动调控车道通车数量,以达到更好的道路通行能力,减少局部区域交通压力,减轻交通拥堵现象。